2018/01/25
移動ロボットにIMUを搭載し、機械学習の一種であるSVMを用いて状態推定を行うROSパッケージです。 前後進、左右旋回、衝突の状態を推定することができます。 推定結果はブラウザ上でリアルタイムに確認することができます。 imu_svm - GitHub 実験の様子 - YouTube
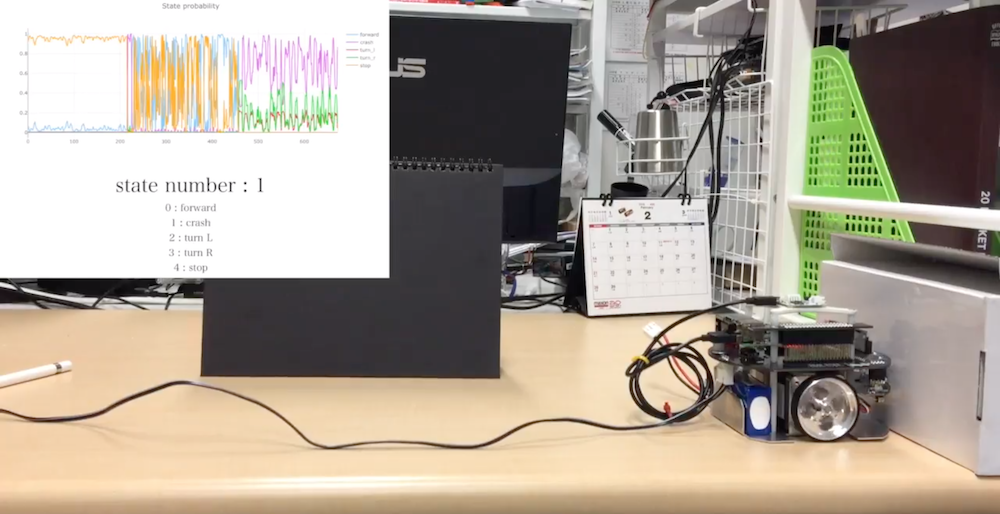
実験の様子 左上に表示されているState number: 1は衝突を検知していることを示している