
2018/01/20
移動ロボットにIMUを搭載し、加速度を特異スペクトル変換することで、ロボットの振動パターンの変化度を計算するROSパッケージです。
壁への衝突や移動方向の切り替えを検知することができます。
算出した変化度はブラウザ上でリアルタイムに確認することができます。
ちなみにこの実験で使用した移動ロボット、RasPiMouseにIMUを固定する部品を設計したところ、本家に採用していただきました。下記リンクでDLできるのでよかったらどうぞ。
imu_sst - GitHub
RasPiMouse_IMUmount.stl - GitHub
実験の様子 - YouTube
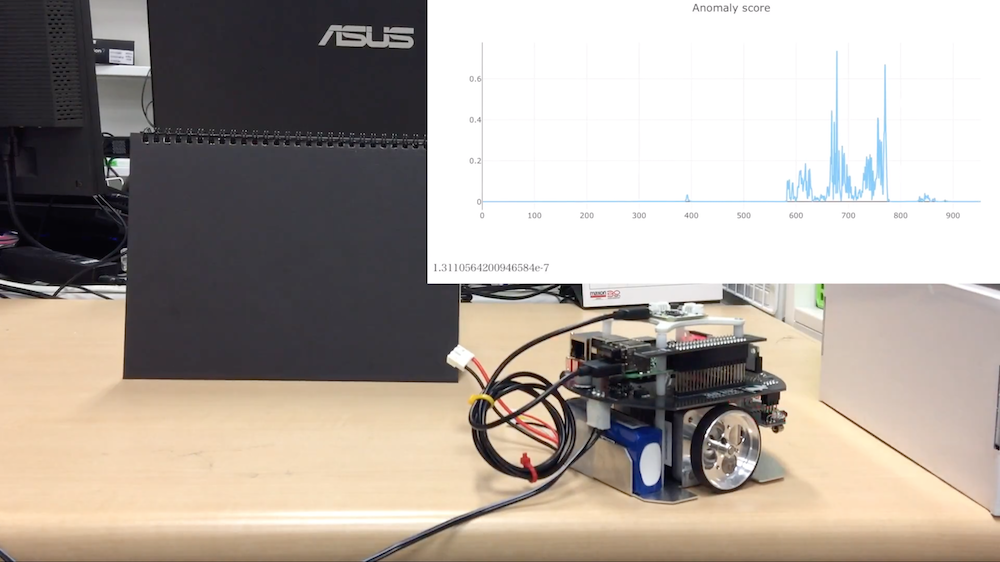
実験の様子 右上が算出された変化度